projects
A collection of projects during my studies.

At ETH Zurich
- Online Adaptation using Graph Networks in Model-based RL
- Using Semantics to detect Camera Miscalibrations
- Multi-camera DeepTAM (report, code)
- Verification of Neural Networks using Linear Programming (report, code)
- Monocular Odometry with Bundle Adjustment (report, video, code)
At IIT Kanpur
- Survey on Variational Autoencoders for Bayesian Inference (report)
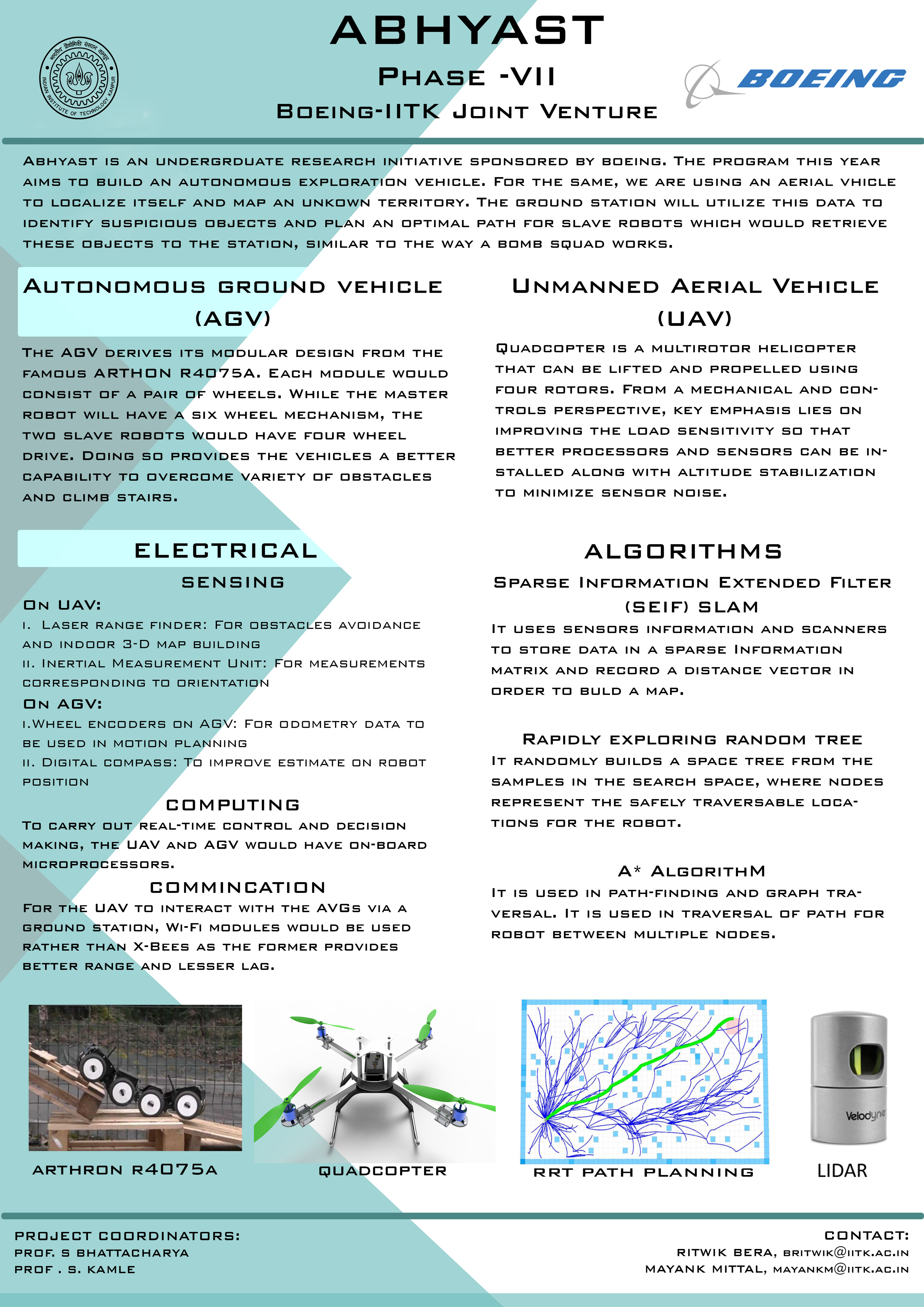
- Multi- Robot System for Bomb Disposal (poster, code)
- Visual Odometry using careful Feature Selection and Tracking (report, code)
- MATLAB based GUI for Motion Planning (code)
- Failure Handling in Swarm of Quadrotors (report)
{kind=link}